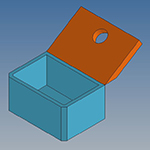
ヒンジタイプの箱と蓋の組み合わせ方法について、簡単なアセンブリモデルを作成してみます。
この記事の動画は一番下にあります。
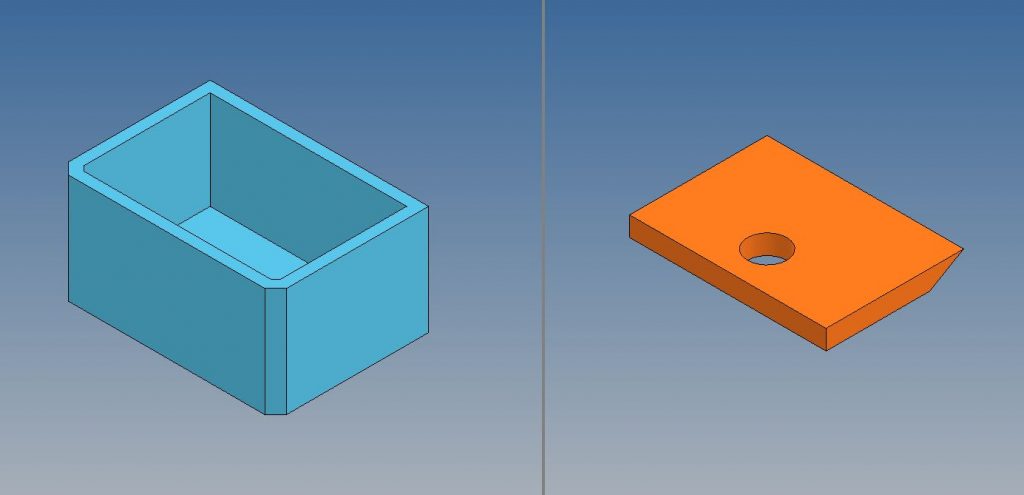
(1)あらかじめ、本体「210111-1.ipt」と蓋「210111-2.ipt」を作成しておきます。
(2)アセンブリファイルを新規作成し、「210111.iam」として保存します。
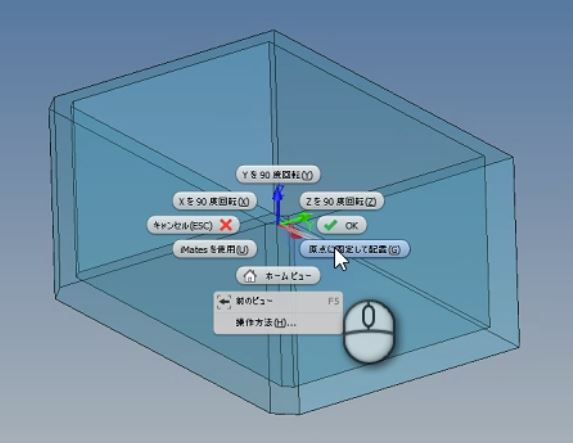
(3)本体「210111-1.ipt」を原点に固定して配置します。
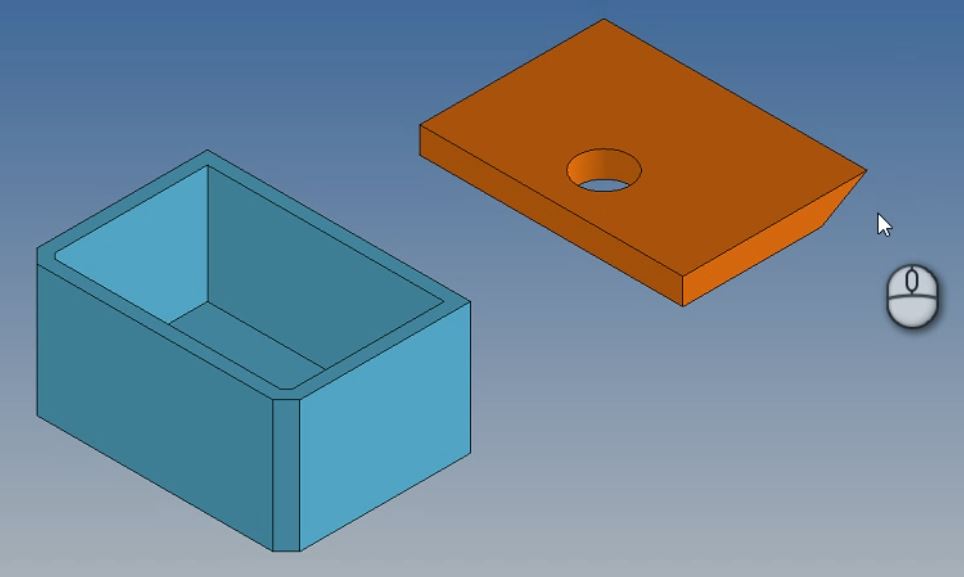
(4)蓋「210111-2.ipt」を任意の位置に配置します。
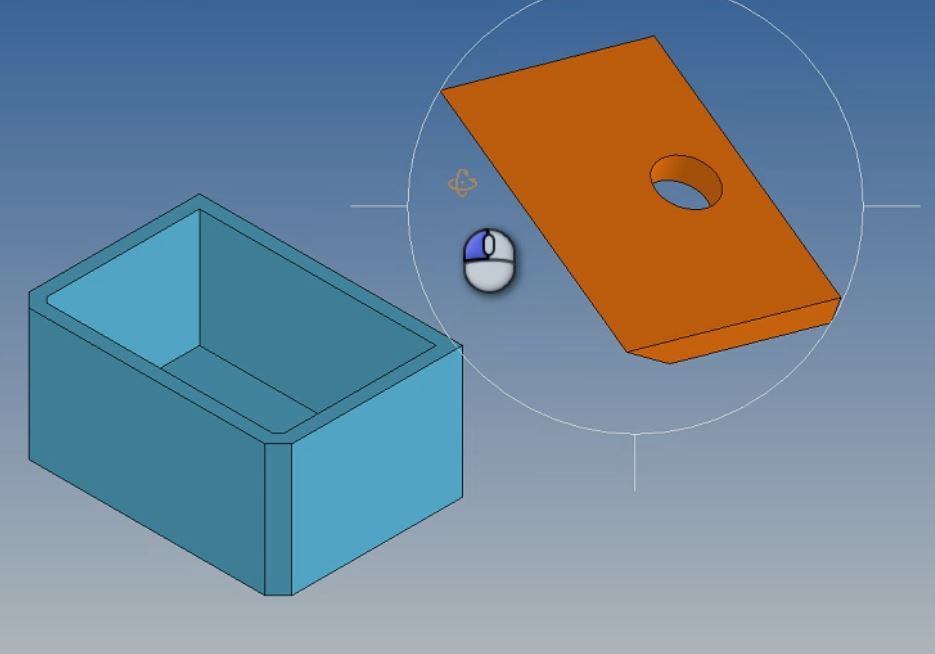
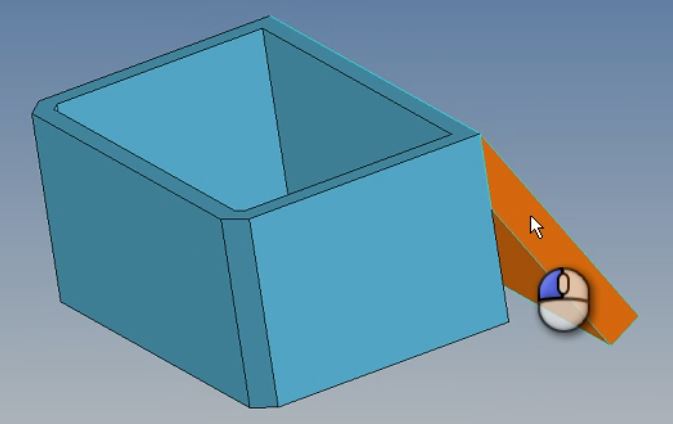
(5)蓋「210111-2.ipt」に対して[自由回転]を実行し、組み立てる方向に近くなるように回転させます。
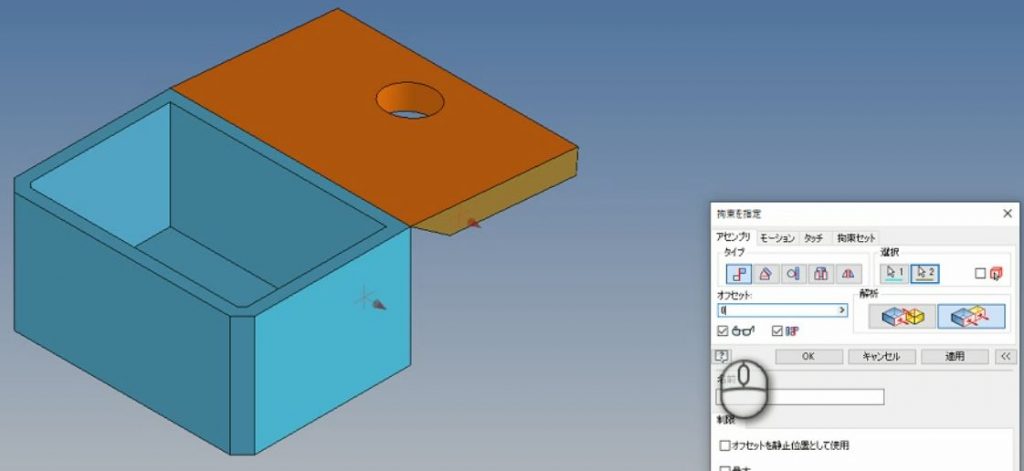
(6)[拘束]>[アセンブリ]>[メイト]を実行し、回転軸となるエッジを選択します。それぞれのエッジは方向を持つので、適切な[解析]を選択して希望する向きになるようにします。
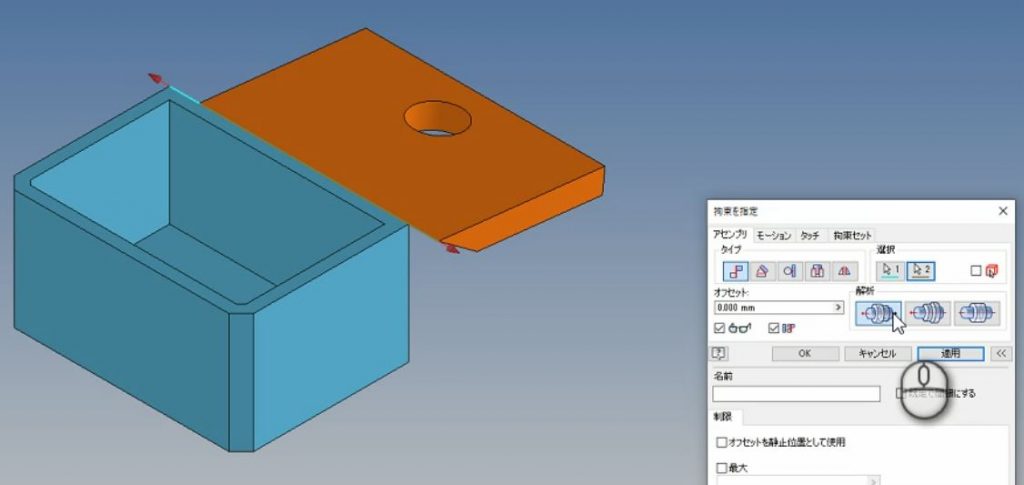
(7)[拘束]>[アセンブリ]>[メイト]を実行し、[解析]は[フラッシュ]を選択します。
(8)それぞれの手前側面を選択し、[オフセット]を 0(ゼロ)に設定します。
注)本体と蓋の横幅寸法が異なる場合は、基準となる作業平面を作成して、中心を合わせる必要があります。
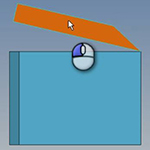
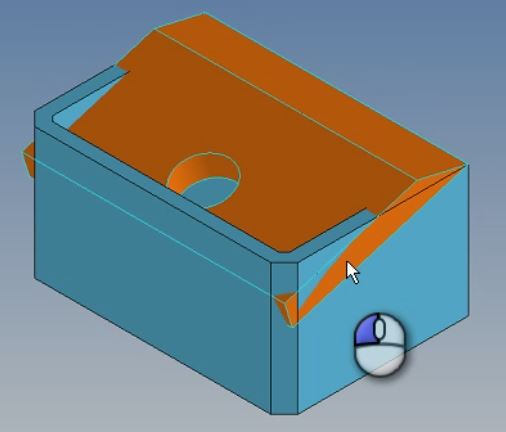
(9)蓋をドラッグすると回転動作するようになりましたが、このままでは本体に喰い込んでしまいます。
(10)[検査]タブ>[干渉]パネルの[アクティブ接触ソルバ]をONにします。これだけでは、まだ中に喰い込みます。
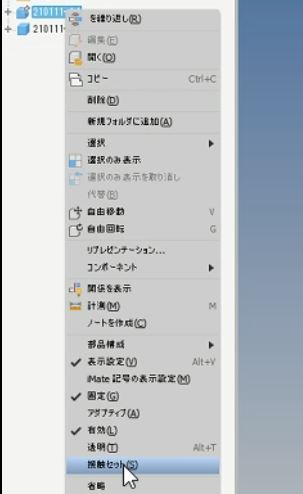
(11)ブラウザ上で、「210111-1.ipt」を右クリックし、[接触セット]をクリックします。「210111-2.ipt」についても同様です。
(12)部品同士が接触すると停止するようになります。
注)アクティブ接触ソルバがOFFの状態では、接触を検知しません。

次回は、簡単そうで実はわかりづらい「角度拘束」について、このアセンブリモデルを使って解説する予定です。
この記事の動画
Fullscreenモードでご覧ください(動画右下の正方形アイコン)